|
Using
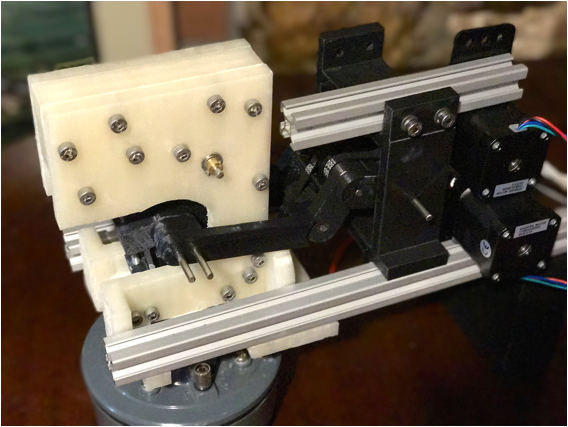
Vbot robotic manipulandum
to investigate human motor control of arm movement
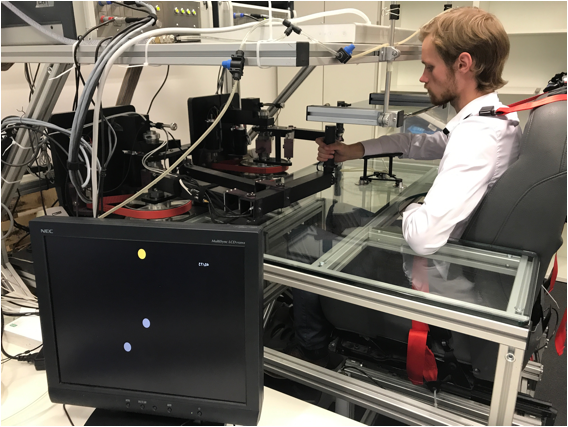
The picture and video show
the use of the vBot robotic manipulandum.
This device is able to record movement of the handle and also exert forces
on the participant’s hand. When used within its custom 2D virtual reality
environment, it can simulate simple virtual worlds and objects with
different movement dynamics. Using this equipment, it is easy to assess
movement performance and learning of novel tasks.
Here a participant is
performing a 2-part movement task. This consists of a lead-in movement
followed immediately by the main movement while grasping the handle of the
robotic device. We recently showed that lead-in movement (related to
backstroke in sports like tennis) that immediately precedes a forward stroke
plays an important role in learning.
These results could have
important implications for both skill learning and movement rehabilitation,
since it demonstrates that any immediately preceding movement, such as in a
golf stroke or tennis swing, needs to be consistent to achieve fast
learning
Click on photo
opposite to see the vBOT in action!
|